一、面向复杂重大装备的多传感器融合信息物理融合系统
基于原位传感监测的航发轴承信息物理系统
通过关键零部件上安装的多源传感器和自供电器件,监测设备关键零部件运行状态,结合高置信度建立多物理场耦合模型评估设备整体状态,实现关键零部件的原位、在线监测,结合物理信息神经网络、迁移学习等技术,精确评估整个设备的运行状态、健康状况。 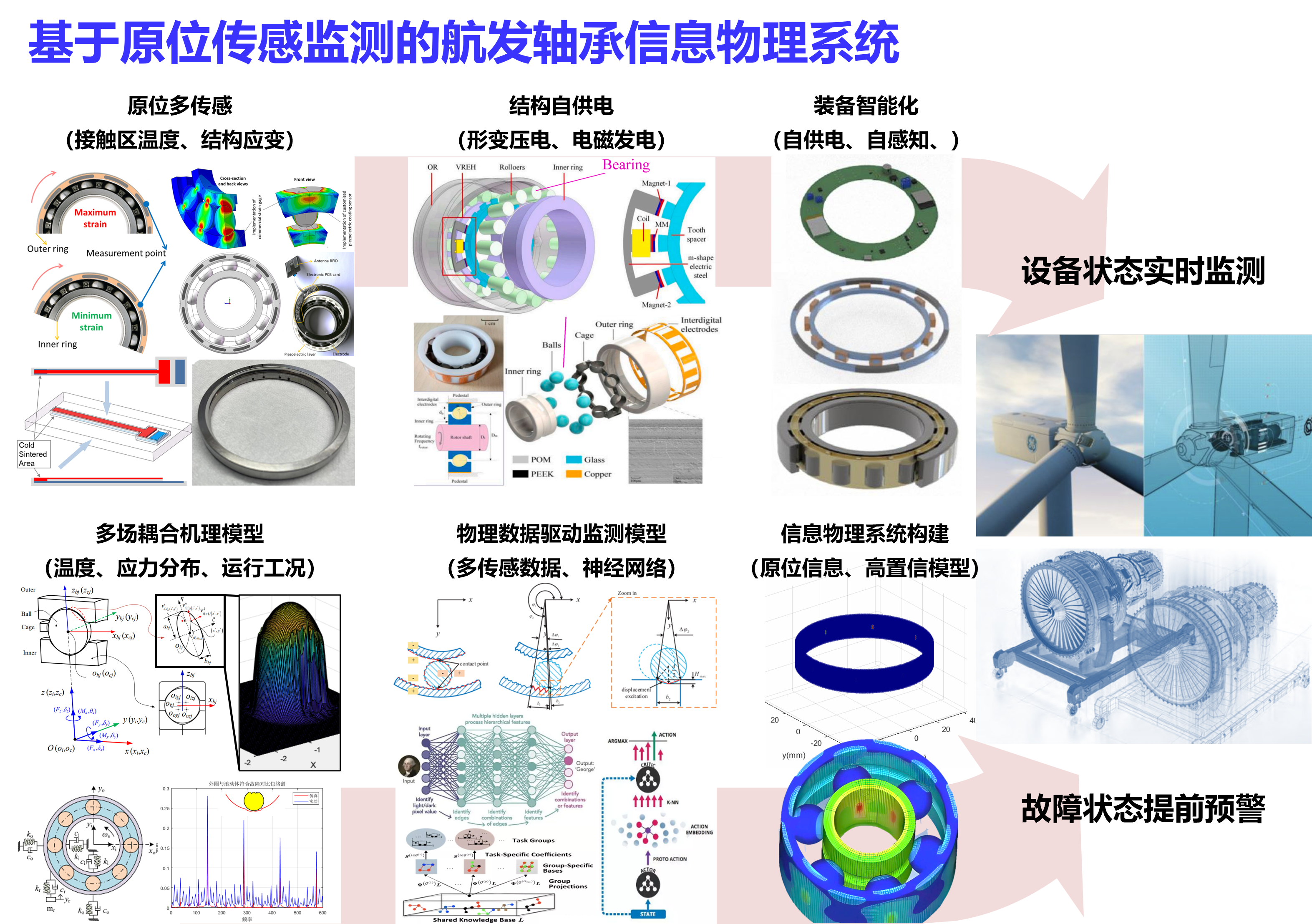
轴承性能试验
多传感器信息融合轴承试验技术旨在通过多维/多源信息融合技术和数字孪生试验技术提高轴承试验可靠性,通过融合多类型、多数量传感器信息,建立多物理场耦合模型,分析、评估轴承工作状态,通过数字化试验和强化试验交互反馈过程,建立轴承试验的准确评价技术和规范,为高端轴承制造带来支撑。 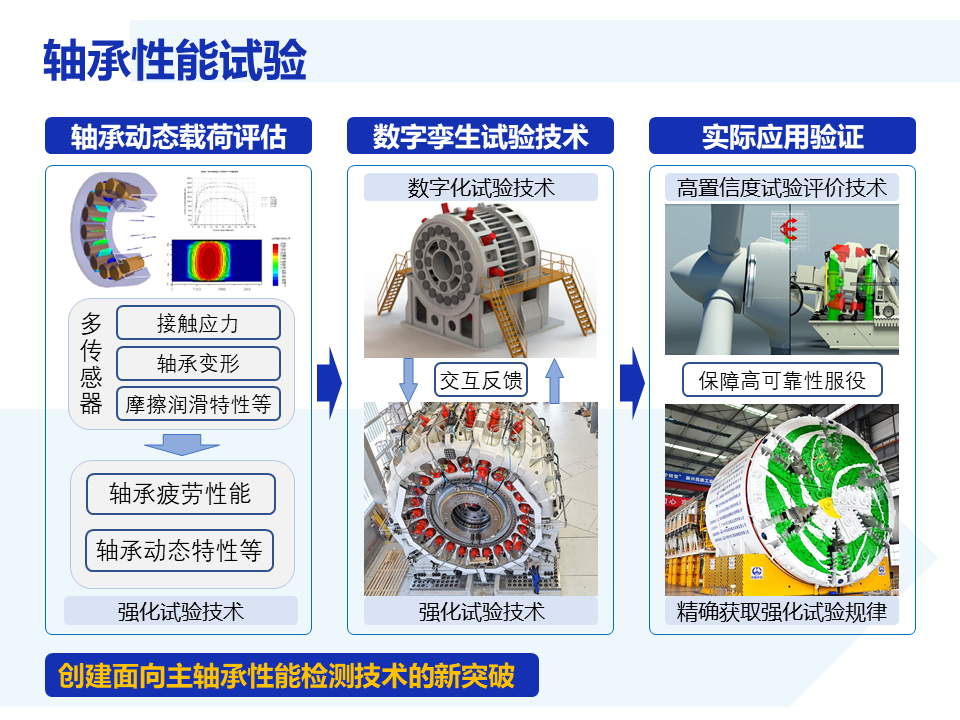
基于多层级信息物理系统的智能化工厂
在工业互联网、智能制造和新一代信息技术的推动下,针对传统制造业企业常常面临生产效率低下、资源浪费、品质控制难、信息孤岛和协同困难等问题。在实现工厂自动化与信息化系统搭建的基础上,结合制造过程机理模型与多源数据模型创建工件及机床物理实体的虚拟模型,通过虚实交互反馈、数据融合分析、模型迭代优化等手段完成虚实试验协同互补,实现工厂装备零件的实时性、回顾性、前瞻性全周期性能评测 。 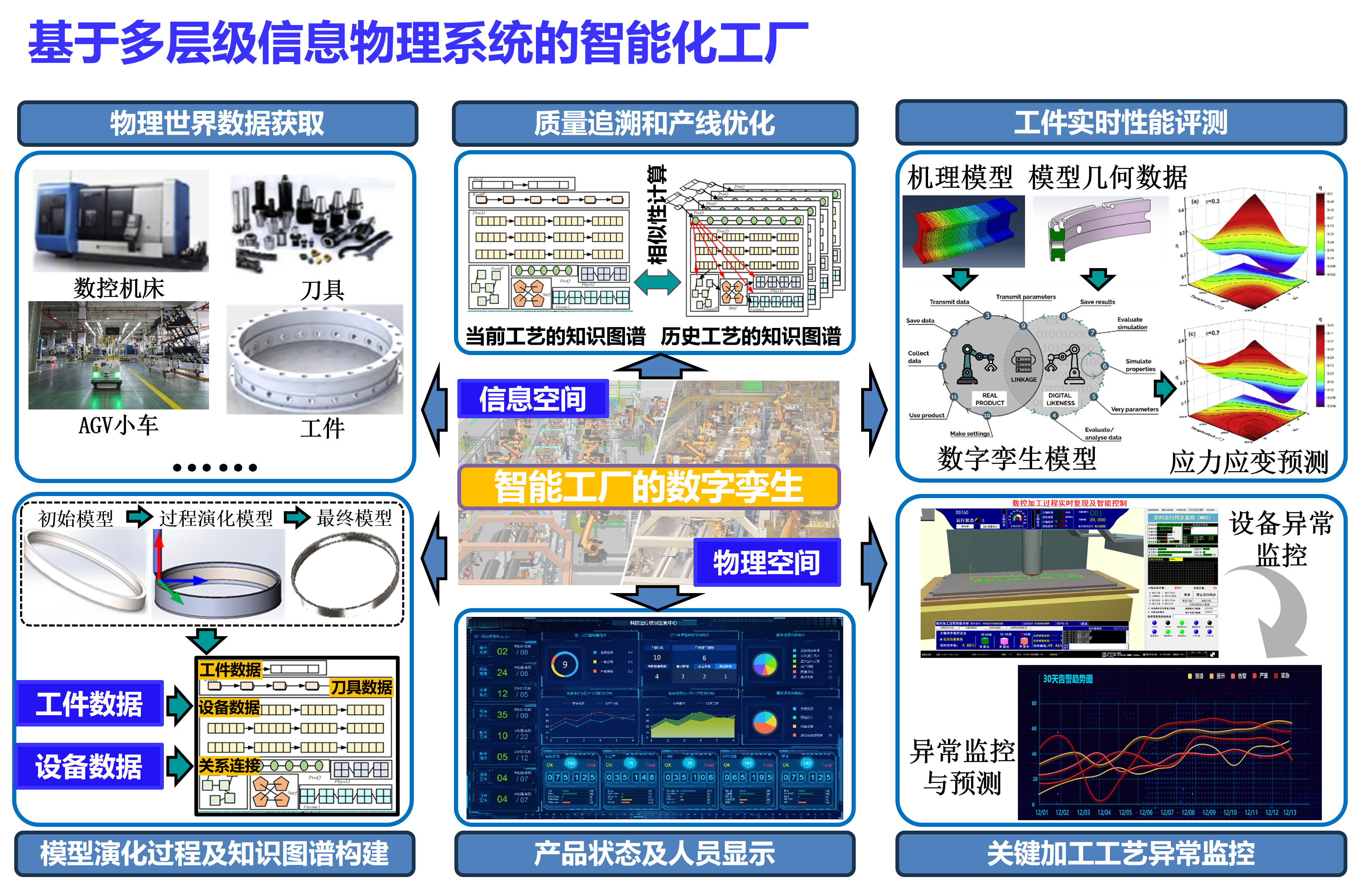
面向大长径比深孔的原位测量与自适应加工方法研究
针对飞机作动筒等大长径比深孔加工中精度不高、难以测量的问题,开展刀具颤振及磨损监测系统与加工误差原位测量系统的研究。通过创新性监测系统,实时获取颤振与刀具磨损状态,结合大数据分析与智能算法,为加工稳定性与刀具寿命提供支持。同时,原位测量系统采用先进传感技术,实现对深孔误差的高精度在机测量监控,确保加工过程中的实时反馈与闭环控制。最终通过这些技术的协同作用,实现深孔加工的自适应误差补偿,提升精度与效率。 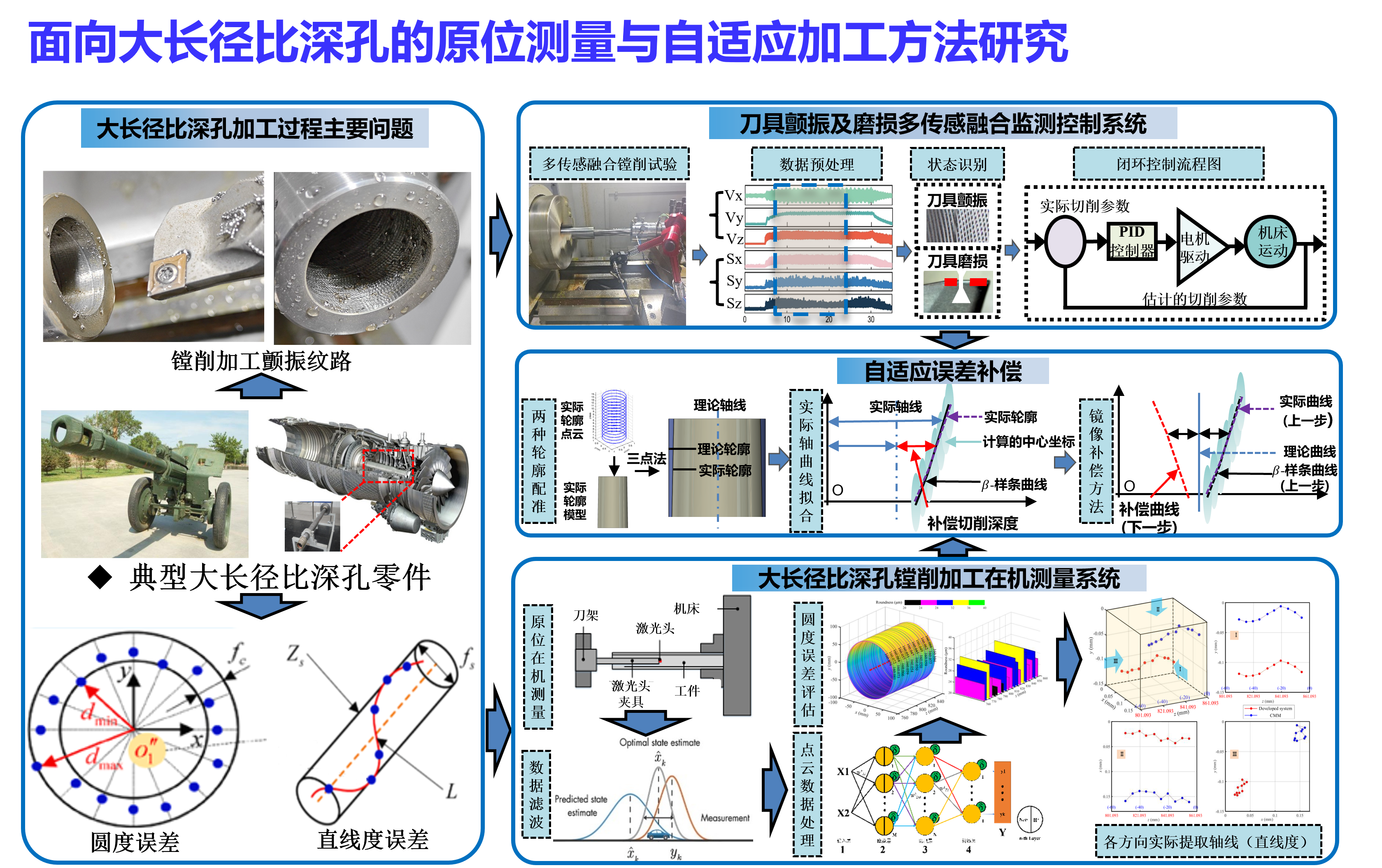
二、面向精准医疗的人体神经肌骨数字孪生系统
多尺度人体肌肉骨骼数字孪生系统
多尺度人体肌肉骨骼数字系统是一种集成了传感器融合技术和有限元模拟方法的孪生系统,用于对人体的肌肉骨骼结构进行建模和仿真。通过结合数字化技术、生物力学模型、图像处理和机器学习等方法,以精确、可视化的方式模拟人体的肌肉骨骼系统,提供多尺度解析。 
在体仿真驱动膝关节假体形性一体化设计
在体仿真驱动膝关节假体形性一体化设计是一种集成机器学习、多目标优化、数理分析、有限元模拟等技术的创新关节假体设计方法。现有假体设计方法无法在设计阶段考虑假体综合性能,假体高维曲面形性关联机理,更缺少在体评测优化手段。本方法基于大样本国人自然关节特征统计学分析结果,耦合定制化多尺度刚柔混合肌骨数字模型,实现关节假体的创新设计和多维优化。 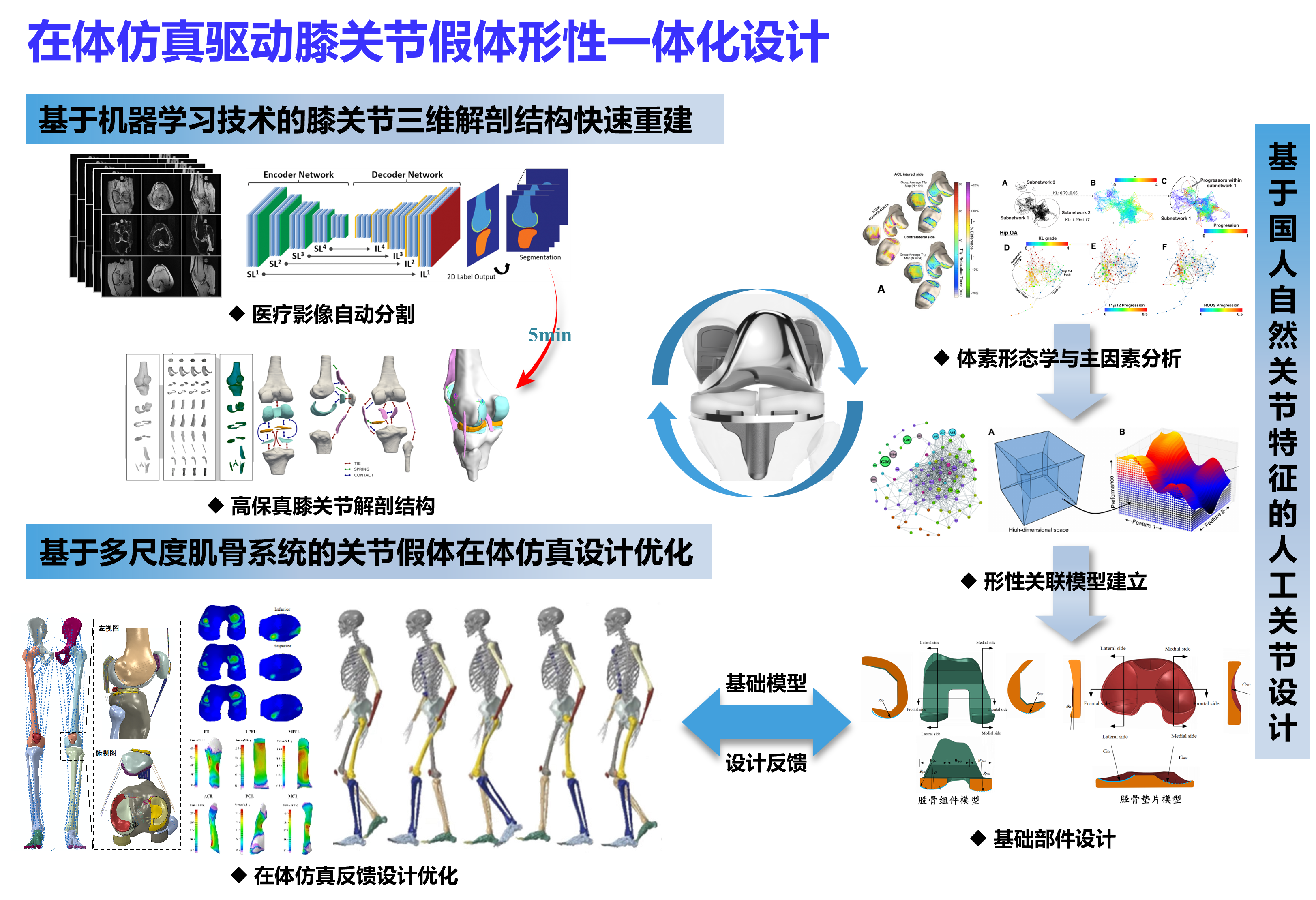
多模态人机交互方向
为了应对人机协同控制、多模态人机接口、神经肌肉系统罕见病及其康复中生物电信号采集、处理和应用的难题,开展多模态人机交互研究。针对现有生理电信号采集中的问题,如模态单一、信号质量低、传感电极的时空分辨率低、皮肤保形能力差、界面阻抗高,开发柔性可拉伸的高密度肌电、应变及温度多模态采集电极,并研发多模态高通量无线信号采集与处理系统。基于高保真多模态数据,通过数据解码研究人体神经肌肉控制机理,实现神经信号驱动的肌肉运动和肌肉力实时预测。建立以神经信号等多模态信号驱动的人体神经肌肉骨骼算法,并将研究成果应用于人机协同控制、神经肌肉罕见病诊疗与康复以及高性能假肢研发。 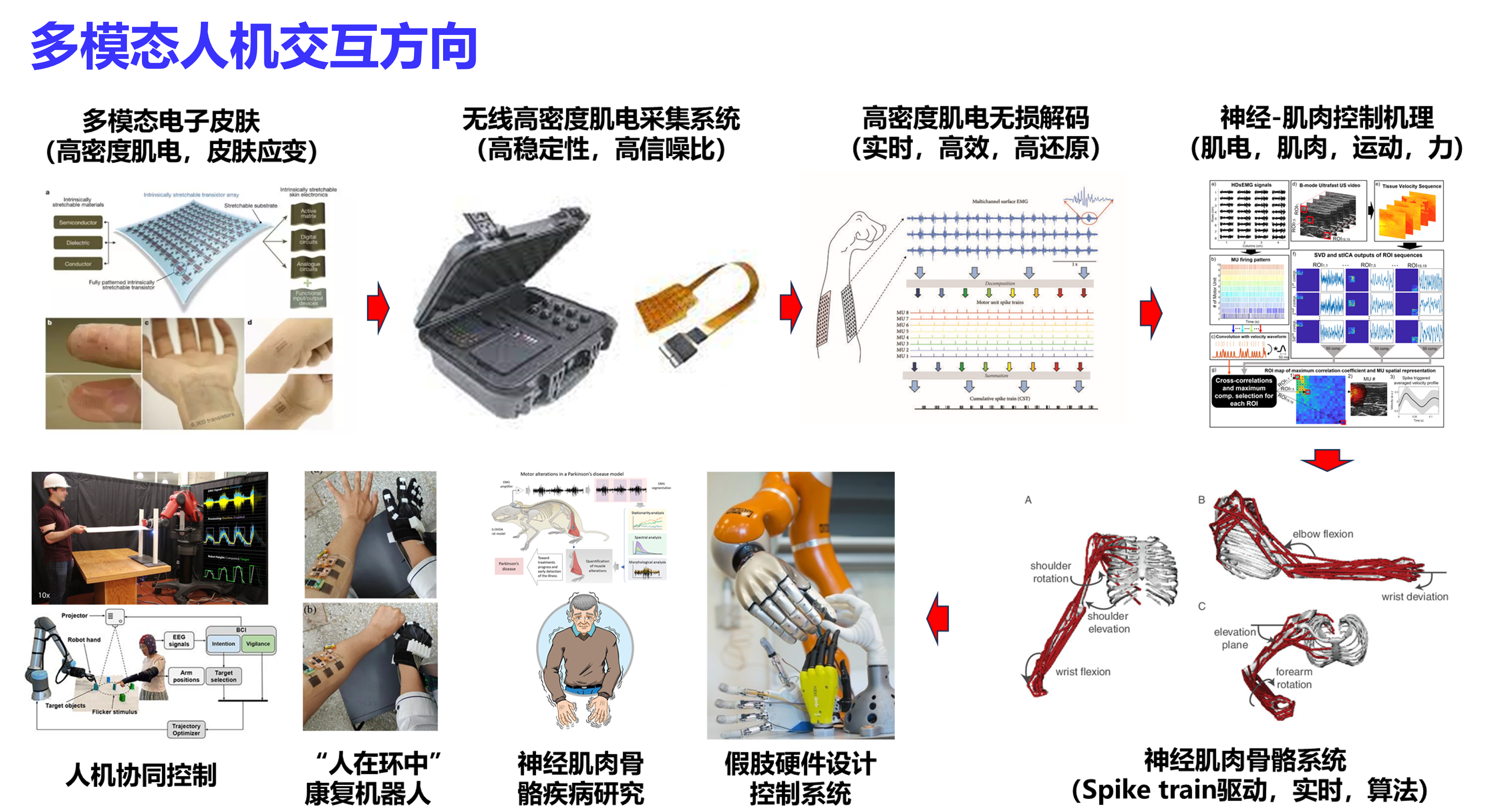
基于AR的髋膝兼容手术导航系统
基于增强现实(AR)的髋膝兼容手术导航系统是一种利用增强现实技术辅助髋膝关节手术的系统。该系统结合了虚拟现实和实时图像处理技术,将计算机生成的虚拟信息与患者实际解剖结构进行实时叠加,以提供准确的手术导航和可视化指导。 